iBoat6无人船是由普适导航自主设计研发的一款专注于水下地形测绘、水面巡逻侦查、水质走航的多功能无人船平台,搭载普适自研的智能船控系统,自动化程度高,抗扰动能力强,船体拓展性广,可以搭载测深仪、侧扫声呐、水质传感器等设备,能够高效准确的完成对水下地形、水质多参、特定目标物等信息的自动采集、处理和分析。
| 参数 | 指标 | |
|---|---|---|
| 船体 | 船体尺寸 | 980*520*254mm |
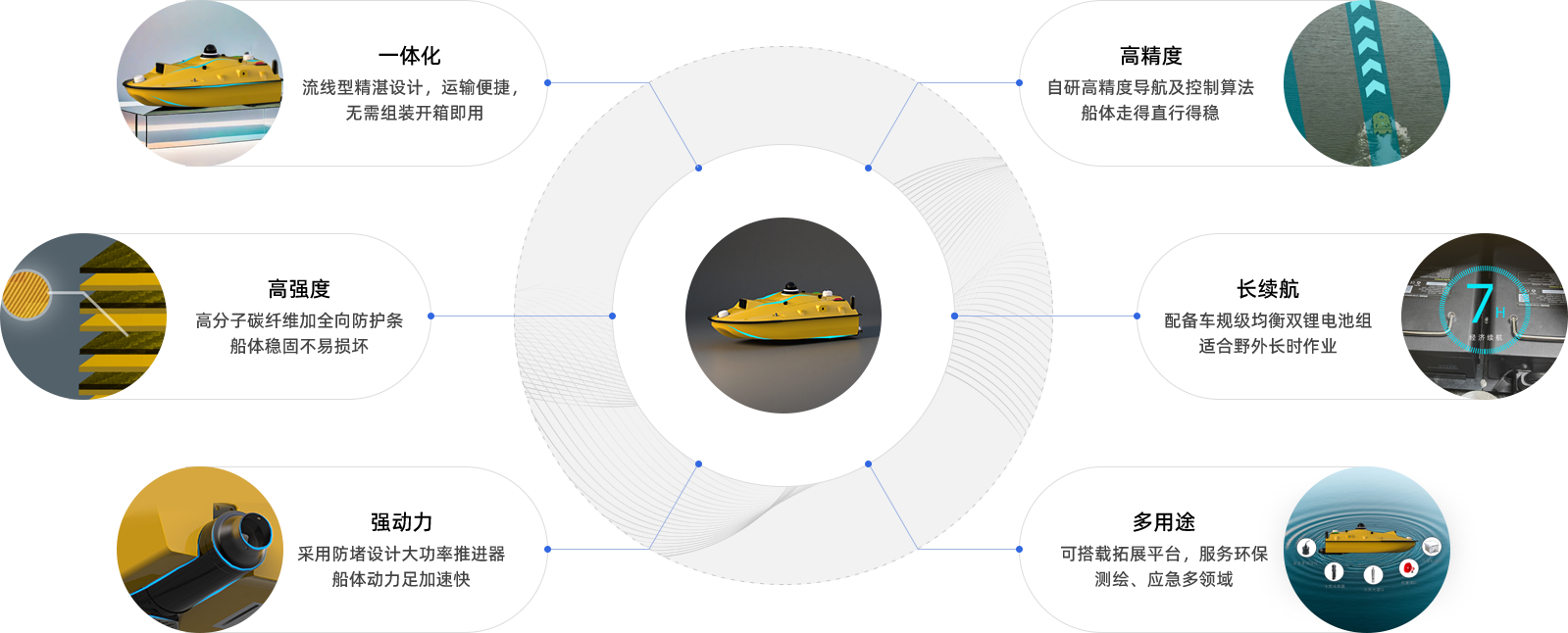
| 材质 | 高分子聚酯碳纤维、凯夫拉布 | |
| 船型 | 全曲面M型单体船 | |
| 吃水 | 8.5cm | |
| 自重 | 船壳7kg,整船重30kg(含基础外设、船控和电池) | |
| 最大载重 | 35kg | |
| 抗风浪等级 | 3级风,2级浪 | |
| 防水防尘 | IP67 | |
| GNSS | 船体内置GNSS定位定向双天线 | |
| 指示灯 | 双色灯,可指示遥控器信号和GNSS定位状态指示 | |
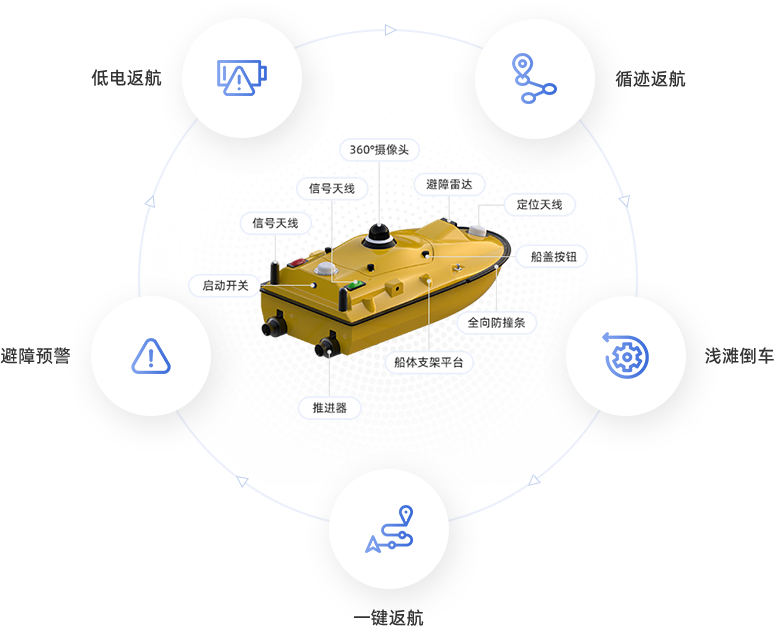
| 视频 | 360°全向夜视摄像头 | |
| 安全 | 浅滩自动循迹倒车、雷达自动避障 | |
| 避障范围 | 俯仰*方位:120°*120°,测距范围:0.10-20m(选配可达40m测距范围) | |
| 防护措施 | 船身全向防撞条,船头+船底加强防撞条,双层船壳防沉没 | |
| 拓展平台 | 支持拓展搭载光学相机、激光雷达、报警喇叭、气体检测仪、多参数水质仪、电动水质采样器、侧扫声纳等,开放SDK接口支持二次开发 | |
| 参数 | 指标 | |
|---|---|---|
| 动力 | 动力类型 | 电动 |
| 电机类型 | 无刷电机 | |
| 转向类型 | 无舵机差速转向,支持倒车 | |
| 马达功率 | 单马达最大功率≥1200W | |
| 马达转速 | 最大 7500 转每分钟 | |
| 马达安装方式 | 插拔设计,易拆换 | |
| 防水草方式 | 半嵌入式涵道设计,流线型防水草罩,防堵转结构设计,防异物剐蹭 | |
| 电池规格 | 33.6V25Ah*4 可充电三元锂电池,21700 电芯 | |
| 供电方式 | 支持单电池独立供电,双电池均衡供电 | |
| 电池更换 | 支持不关机热插拔更换 | |
| 续航时间 | 标配 8 小时 @2m/s,14 小时 @1.5m/s;选配可达 16 小时 @2m/s,28 小时 @1.5m/s | |
| 续航里程 | 经济航速续航里程 70km | |
| 最高航速 | 7m/s,支持安全穿越 4m/s 流速断面 | |
| 参数 | 指标 | |
|---|---|---|
| 遥控 | 尺寸 | 27713896mm |
| 显示屏 | 工业触摸屏 + 阳光可视屏 | |
| 分辨率 | 1920*1200 | |
| 亮度 | 最大 1200nit | |
| 内存 | 运行内存 4GB,存储内存 64GB | |
| 频段 | 2.400-2.483GHz | |
| 通讯距离 | 数传距离 3km,4G 距离无限制 | |
| 电池容量 | 20000mAh | |
| 工作续航 | 8 小时 | |
| 充电功率 | 18W 快充,兼容市场标准 Type-C 接口 | |
| 接口 | PPM、RJ45、USB、Type-c、SIM 卡槽、TF 卡槽 | |
| 船体控制 | 一键控制手动 / 自动 / 悬停 / 返航,航线规划 / 安全设置 / 船控参数 / 无人船信息快捷功能按键,船端三视角视频拍照录制,主视频自回中拨轮,视频界面一键切换 | |
| 参数 | 指标 | |
|---|---|---|
| 控制 | 操作系统 | 27713896mm |
| 基站通讯 | 工业触摸屏 + 阳光可视屏 | |
| 数据通讯 | 1920*1200 | |
| 视频通讯 | 最大 1200nit | |
| SIM 卡槽 | 运行内存 4GB,存储内存 64GB | |
| 接口 | 2.400-2.483GHz | |
| 内存 | 数传距离 3km,4G 距离无限制 | |
| 主控防水防尘 | 20000mAh | |
| 控制模式 | 8 小时 | |
| 充电功率 | 18W 快充,兼容市场标准 Type-C 接口 | |
| 接口 | PPM、RJ45、USB、Type-c、SIM 卡槽、TF 卡槽 | |
| 船体控制 | 一键控制手动 / 自动 / 悬停 / 返航,航线规划 / 安全设置 / 船控参数 / 无人船信息快捷功能按键,船端三视角视频拍照录制,主视频自回中拨轮,视频界面一键切换 | |
| 参数 | 指标 | |
|---|---|---|
| 定位 | 卫星系统 | BDS(BDS-2:B11,B21,B3L;BDS-3:B11,B31)、GPS(L1C/A,L2P,L2C)、GLONASS(G1,G2)、Galileo(E1,E5b)、QZSS*(L1C/A,L2C)、SBAS*(L1C/A) |
| 通道数 | 1408 通道 | |
| 冷启动 | <30s | |
| 初始化时间 | <5s(D<10km) | |
| 单点定位精度 | 平面≤3m,高程≤1.5m | |
| DGNSS 定位精度 | 平面:40cm+1ppm,高程:80cm+1ppm | |
| RTK 定位精度 | 平面:±8mm+1ppm,高程:±15mm+1ppm | |
| CORS 差分源 | 支持网络 CORS | |
| 电台差分 | 支持 TT450 协议 / 透明传输协议等 | |
| 定向精度 | 精度:0.1°(1m 基线) | |
| 惯导精度 | PPM、RJ45、USB、Type-c、SIM 卡槽、TF 卡槽 | |
| 船体控制 | 6°/h,20S 精度衰减 1m,支持桥下持续自主导航及测量 | |
| IMU 更新率 | 200Hz | |
| 参数 | 指标 | |
|---|---|---|
| 测深 | 频率 | 200KHz |
| 波束角 | 5°±1° | |
| 测深范围 | 0.15–300m (可选配) | |
| 分辨率 | 1cm | |
| 稳定率 | ±2cm(CEP.95@10m) | |
| 测深精度 | ±1cm+0.1% D (D 为水深值) | |
| 最大采样频率 | 30Hz | |
| 供电电压 | 9V–18V | |
| 声速调整范围 | 0m/s~1700m/s | |
| 功耗 | 10W | |
| 防尘防水 | IP67 | |
| 参数 | 指标 | |
|---|---|---|
| 软件 | 软件系统 | 安卓,鸿蒙 OS |
| 船体控制 | 支持多种航线规划方式、断点续测、无人船轨迹实时显示、自动避障、剩余里程提醒;支持三视角独立视频、360° 云台相机控制、物理 & 虚拟摇杆 | |
| 数据采集 | 支持坐标转换、水深值 / 回波数据 / 水质数据 / 侧扫声纳数据实时显示;具备测量记录控制、测深参数控制功能 | |
| 数据处理 | 可进行工程参数计算、水深波形叠加处理、姿态校正、任意特征点提取;支持手动改点插点、潮位文件验潮、多种数据格式导出、PPK 后处理解算、目标物 AI 识别 | |
| 安全功能 | 具备失联自动返航、浅滩预警及倒车、低电量预警及自动返航、一键自动返航功能 | |
| 升级 | 支持软固件在线推送升级 | |
| 自检警报 | 包含开机系统自检及异常提醒、巡航速度异常预警、低电量警报、测深仪异常警报、避障警报、浅滩警报 | |
iBoat8无人船是由普适导航自主设计研发的一款专注于水下地形测绘、水面巡逻侦查、水质走航的多功能无人船平台,搭载普适自研的智能船控系统,自动化程度高,抗扰动能力强,船体拓展性广,可以搭载测深仪、侧扫声呐、水质传感器等设备,能够高效准确的完成对水下地形、水质多参、特定目标物等信息的自动采集、处理和分析。
| 参数 | 指标 | |
|---|---|---|
| 船体 | 船体尺寸 | 1200*580*400mm |
| 吃水 | 12cm | |
| 自重 | 12kg(船壳) | |
| 最大载重 | 50kg | |
| 中央月池直径 | 30cm | |
| 抗风浪等级 | 5级风,3级风 | |
| 材质 | 高分子聚酯碳纤维、凯夫拉布 | |
| 船型 | 全曲面M型单体船,防雷、防浪涌、防突浪 | |
| 防水防尘 | IP67 | |
| GNSS | 船体内置 GNSS 定位定向双天线,无需外接 RTK | |
| 指示灯 | 双色灯,可指示遥控器信号和 GNSS 定位状态 | |
| 视频 | 360° 全向夜视摄像头 | |
| 电源 | 船身外部充电口,船体电源一键启动按键,定制无线充电 | |
| 安全 | 浅滩自动循迹倒车、失联循迹返航、雷达主动避障和视频观察、船体温湿度智能检测 | |
| 避障距离 | 0.2-40m | |
| 防护措施 | 船身全向防撞条,船头 + 船底加强防撞条,船头底部与推进器平行设计,双层船壳防沉没 | |
| 参数 | 指标 | |
|---|---|---|
| 动力 | 电池规格 | 33.6V30Ah*2 可充电三元锂电池,21700 电芯 |
| 供电方式 | 支持单电池独立供电,双电池均衡供电 | |
| 电池更换 | 支持热插拔更换 | |
| 续航时间 | 6小时@2m/s, 14小时@1.5m/s | |
| 动力类型 | 电动 | |
| 电机类型 | 无刷电机 | |
| 转向类型 | 无舵机差速转向,支持倒车 | |
| 马达功率 | 额定功率1100W | |
| 马达转速 | 额定4000RPM | |
| 最高航速 | 6m/s,支持安全穿越4m/s流速断面,速度精度0.03m/s | |
| 马达安装方式 | 插拔设计,无外露线束,易拆换 | |
| 防水草方式 | 半嵌入式涵道设计、流线型防水草罩、防堵转结构设计、防异物剐蹭 | |
| 参数 | 指标 | |
|---|---|---|
| 遥控 | 尺寸 | 7 寸 |
| 显示屏 | 工业触摸屏 + 阳光可视屏 | |
| 分辨率 | 1920*1200 | |
| 亮度 | 最大 1200nit | |
| 内存 | 运存≥4GB,存储容量≥64GB | |
| 通讯距离 | 数传距离 3km,4G 距离无限制 | |
| 电池容量 | 20000mAh | |
| 工作续航 | 8 小时 | |
| 参数 | 指标 | |
|---|---|---|
| 作业 | 水下全地形地貌测量 | 电动 |
| 水文流量测验 | 无刷电机 | |
| 水质采样 | 无舵机差速转向,支持倒车 | |
| 水质监测 | 在线监测:氨氮、COD、其他参数可拓展 | |
| 河道巡查 | 最大 7000 转每分钟 | |
| 水表光谱测量 | 6m/s | |
| 水下地层探测 | 插拔设计,无外露线束,易拆换 | |
| 参数 | 指标 | |
|---|---|---|
| 控制 | 操作系统 | Linux |
| 数据通讯 | 2.4G/5.8G/4G | |
| 视频通讯 | 2.4G/5.8G/4G | |
| SIM 卡槽 | Nano 卡槽 | |
| 接口 | 2*RJ45网口、2*RS232串口、2*RS485串口 | |
| 运行内存 | 4GB | |
| 存储 | 32GB | |
| 主控防水防尘 | IP67 | |
| 控制模式 | 手动 & 自动 | |
| 参数 | 指标 | |
|---|---|---|
| 定位 | 卫星系统 | 单BDS |
| 冷启动 | <30s | |
| 初始化时间 | <5s(D<10km) | |
| RTK 定位精度 | 平面:±8mm+1ppm,高程:±15mm+1ppm | |
| CORS 差分源 | 支持网络 CORS | |
| 电台差分 | 支持 TT450 协议 / 透明传输协议等 | |
| 定向精度 | 精度:0.1°(1m 基线) | |
| 参数 | 指标 | |
|---|---|---|
| 测深 | 频率 | 200KHz |
| 波束角 | 5°±1° | |
| 测深范围 | 0.15-300m (可选配) | |
| 分辨率 | 1cm | |
| 稳定率 | ±2cm(CEP.95@10m) | |
| 测深精度 | ±1cm+0.1% D (D 为水深值) | |
| 最大采样频率 | 30Hz | |
| 供电电压 | 9V-18V | |
| 声速调整范围 | 0m/s~1700m/s | |
| 功耗 | 10W | |
| 防尘防水 | IP67 | |
| 参数 | 指标 | |
|---|---|---|
| 软件 | 软件系统 | 安卓,鸿蒙 OS |
| 船体控制 | 状态切换、航线规划、速度控制、断点续测、自动避障、360° 云台摄像头控制、支持物理 & 虚拟摇杆 | |
| 数据采集 | 支持运动轨迹显示、坐标转换、测量记录控制、测量参数控制、作业数据实时显示、水样采集控制、水质数据实时显示记录 | |
| 安全功能 | 失联自动返航、浅滩预警及循迹倒车、低电量预警、一键自动返航、开机系统自检及异常提醒、避障警报、巡航速度异常警报 | |
| 升级 | 支持软固件在线推送升级 | |
| 参数 | 指标 | |
|---|---|---|
| 定位 | 尺寸 | 2200mm*2000mm*800mm(不含栏杆) |
| 重量 | 210kg | |
| 总体浮力 | 800kg | |
| 坞舱尺寸 | 1350mm*650mm | |
| 供电 | 提供无接触充电,充电功率250W | |
| 监控设备 | 2K以上高清摄像头 | |
| 安装固定 | 不锈钢无缝管*4(外径65mm,壁厚2.5mm),位置可指定 | |